О формировании нагрузочных устройств для мехатронных систем с замкнутым кинематическим контуром
Аннотация
Предложена структурная модель функциональных механизмов с напряженным замкнутым контуром применительно к мехатронным системам, проанализированы проблемы формирования нагрузочных устройств. На примере отрезного механизма рассмотрена работа саморегулирующего нагрузочного устройства, приведены результаты экспериментальных исследований.
Ключевые слова: замкнутый контур, энергосбережение, измельчающие машины, нагрузочные устройства.Ключевые слова:
Строительное, дорожное, горное, нефтегазодобывающее производства включают большой комплекс разнообразных работ и технологических процессов. Несмотря на их различия и сложившиеся проектные традиции часть модулей и систем можно считать типовыми, группируя их по функциональному или конструктивному принципу. В области станко- и роботостроения выделение отдельных модулей (управляющих, энергетических и т.п.), их унификация и систематизация развиты достаточно полно. Разработкой обобщенных структурных схем и систематизацией функциональных механизмов в области технологических строительных и дорожных машин занимались Д.П. Волков, В.Я.Крикун, К.К. Шестопалов, В.И. Баловнев, В.И. Брауде, Л.А. Хмара и другие ученые. Аналогичные работы в области горного производства проводили В.И. Солод, А.О. Спиваковский, Л.И. Кантович, Г.Ш. Хазанович, А.Н. Дровников, Г.М. Водяник и другие. О.П. Гуджояном, В.И. Коноплянко и другими систематизированы тандемно-сочлененные агрегаты независимо от их технологического назначения.
Внедрение в структуру мехатронных систем механизмов с замкнутым кинематическим контуром требует их систематизации, обоснования области рационального применения, унификации основных модулей на основе структурной аналогии как устойчивой упорядоченности элементов и связей функциональных устройств. В инженерной практике используются различные системы представления структур, в том числе с замкнутыми контурами, например, в виде топологической сети, графовой модели, модифицированных структурных изображений, условных изображений и т.д. Оригинальная система обозначения систематизации в виде каталогов разработана К. Ротом. Непосредственно для строительных, дорожных, горных и других технологических машин А.Н. Дровниковым, В.С. Исаковым была предложена обобщенная модель [1,2], позволяющая разрабатывать функциональные механизмы с напряженным замкнутым контуром.
Отдельные блоки, соединенные между собой механическими, гидравлическими или иными связями обеспечивают вариативность и произвольное количество контуров наслоения. Разработанный на этой основе метод синтеза типовых структур позволяет получить принципиально новые технические решения. Однако вопрос о размещении нагрузочных устройств и их формировании в соответствии с характером технологического процесса рассматривался лишь частично.
Конструктивно замыкание контура можно производить силовым или геометрическим способом. Силовое замыкание может носить избирательный или временный характер, а также непрерывный или постоянный. Некоторые исследователи, например, С.Н. Кожевников, А.И. Соловьев, О.Г. Озол, А.Н. Дровников, С.Н. Кузнецов и другие отмечают структурные, кинематические и динамические связи, распространяя эти понятия на нагрузочные устройства. Нагружатель с фрикционными элементами управления для испытательных стендов, работающих по замкнутой схеме, рассмотрен Д.П. Волковым и А.Ф. Крайневым. В соответствии с целевой функцией предложенная ими классификация включает три группы нагружателей: обеспечивающие непрерывное нагружение, непрерывное реверсивное и переменное реверсивное.
Принципиальные схемы нагрузочных элементов представлены в работах Э.А. Сухарева, Ш.Г. Гойхмана, Г.К. Трубина, М.М. Хрущева, В.Н. Кудрявцева и других авторов. В частности, рассмотрены механические, гидравлические, электромагнитные и пневматические нагрузочные элементы. Наиболее распространенными являются механические: зубчатые осевого и радиального смещения, муфтовые, рычажно-винтовые и т.д. Данные конструктивные решения могут быть использованы при синтезе вариантов, когда закон нагружения уже определен. Присутствие объекта обработки и изменение структуры механизма в ходе технологического процесса вносит вариативность в закон нагружения. Основываясь на методике синтеза типовых структур механизмов с замкнутым напряженным контуром [1] в схему можно внести следующие дополнения (рис.1).
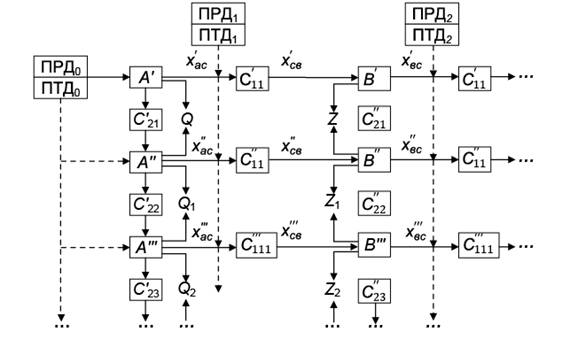
Рис.1 Структурная модель функциональных механизмов с напряженными замкнутыми контурами
ПРД, ПТД – приводы рабочего и транспортного движений соответственно;
A'; А''; …,В'; В'';… - элементы, составляющие вращательные или поступательные группы;
Q; Q1; …, Z; Z1;… - объекты обработки;
![]() ;
; ![]() ; - нагрузочные устройства.
; - нагрузочные устройства.
Источником энергии любой мехатронной системы или её функционального механизма является привод (электрический, гидравлический и т.д.), обозначенный на схеме ПРДО. При этом предполагается возможная установка дополнительного привода для осуществления транспортного процесса ПРДО. Учитывая, что многие технологические машины имеют дополнительные приводы, модель предполагает их установку внутри самого контура (ПРД1; ПТД1; ПРД2; ПТД2; …). Элементы А'; А''; …,В'; В'';… образовывают N групп элементов R(A); R(B); …; R(N), соединенных между собой соответствующими механическими, гидравлическими, либо иными связями (![]()
![]() ;
;![]() ;
; ![]() ; …;
; …; ![]() ;
;![]() ;
; ![]() ; …
; …![]() ) и нагрузочными устройствами
) и нагрузочными устройствами ![]() ;
; ![]() . Замыкание кинематической цепи может происходить через объекты обработки (промежуточные тела), обозначенные на схеме Q и Z. Каждая группа R(A); R(B); …; R(N) может быть составлена из гомогенных элементов в рамках одного блока. Группы различных блоков могут включать гетерогенные элементы.
. Замыкание кинематической цепи может происходить через объекты обработки (промежуточные тела), обозначенные на схеме Q и Z. Каждая группа R(A); R(B); …; R(N) может быть составлена из гомогенных элементов в рамках одного блока. Группы различных блоков могут включать гетерогенные элементы.
Расширение возможностей по установке нагрузочных устройств по сравнению с ранее предложенными моделями позволяет синтезировать принципиально новые схемы функциональных механизмов. Если для исполнительных механизмов технологических машин достаточно иметь дискретно регулируемые нагрузочные устройства, то для энергосберегающих и энергонакопительных модулей характерны жесткие (индифферентные) нагружатели, фрикционные (предельной нагрузки), саморегулируемые (адаптивные), мехатронные (управляемые и интеллектуальные).
Синтез функциональных механизмов с нагружателями первых двух типов уже описан авторами в работах [3,4]. В качестве примера реализации нагружения с саморегулированием можно привести схему отрезного механизма (рис.2).
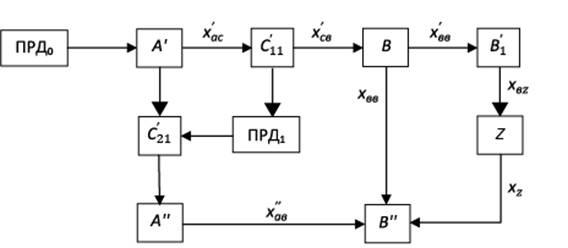
Рис.2. Структурная модель отрезного механизма
В качестве группы R(A) использована цепная передача с винтовой стяжкой ![]() и дополнительным гидравлическим приводом ПРД1.
и дополнительным гидравлическим приводом ПРД1.
Одно из колес зубчатого зацепления R(B) жестко соединено с ножом![]() , который воздействует на объект обработки Z, закрепленный на колесе В''. В период саморегулирования напряжение в контуре А'-В'-В''-А''-А' отсутствует. При включении привода ПРДО крутящий момент через звездочку А', фрикционную муфту
, который воздействует на объект обработки Z, закрепленный на колесе В''. В период саморегулирования напряжение в контуре А'-В'-В''-А''-А' отсутствует. При включении привода ПРДО крутящий момент через звездочку А', фрикционную муфту![]() ,, колесо В' передается на нож
,, колесо В' передается на нож![]() . По другой ветви – через звездочку А', цепь со стяжкой
. По другой ветви – через звездочку А', цепь со стяжкой![]() , звездочку А'' – на колесо В'' с объектом обработки Z.
, звездочку А'' – на колесо В'' с объектом обработки Z.
В зависимости от величины крутящего момента, необходимого для первой резки, муфта включает промежуточный привод ПРД1, который в свою очередь затягивает винтовую стяжку![]() . Таким образом, по окончании процесса саморегулирования в контуре А'-В'-В''-А''-А' создается предварительное натяжение, пропорциональное усилию резания. В дальнейшем, например при затуплении ножа
. Таким образом, по окончании процесса саморегулирования в контуре А'-В'-В''-А''-А' создается предварительное натяжение, пропорциональное усилию резания. В дальнейшем, например при затуплении ножа ![]() , муфта
, муфта ![]() может повторно включить привод ПРД1 с целью увеличения предварительного напряжения замкнутого контура.
может повторно включить привод ПРД1 с целью увеличения предварительного напряжения замкнутого контура.
В период основной работы на холостом ходу, т.е. объект Z отсутствует, происходит замыкание контура А'-В'-В''-А''-А'. При соприкосновении ножа ![]() с объектом обработки возникает дополнительный контур А'-В'-
с объектом обработки возникает дополнительный контур А'-В'-![]() -Z-В''-А''-А'. Связь хвв ослабевает и постепенно заменяется связями хвz и xzв. Наибольший эффект от использования предварительно напряженного замкнутого контура достигается, когда при максимальном усилии резания связь хВВ полностью разъединяется, т.е. усилие между зубьями колес В' и В'' равно нулю. В этом случае все предварительное напряжение контура передается через нож
-Z-В''-А''-А'. Связь хвв ослабевает и постепенно заменяется связями хвz и xzв. Наибольший эффект от использования предварительно напряженного замкнутого контура достигается, когда при максимальном усилии резания связь хВВ полностью разъединяется, т.е. усилие между зубьями колес В' и В'' равно нулю. В этом случае все предварительное напряжение контура передается через нож ![]() и объект обработки Z. При окончании резания связи хвz и xzв разрываются. Замкнутость контура обеспечивает связь хвв, величина предварительного напряжения внутри контура остается постоянной.
и объект обработки Z. При окончании резания связи хвz и xzв разрываются. Замкнутость контура обеспечивает связь хвв, величина предварительного напряжения внутри контура остается постоянной.
Апробация разработанной схемы осуществлена на экспериментальном стенде. При исследовании установлено, что рациональная величина предварительного напряжения контура не является постоянной для материалов с различными физическими свойствами (рис.3).
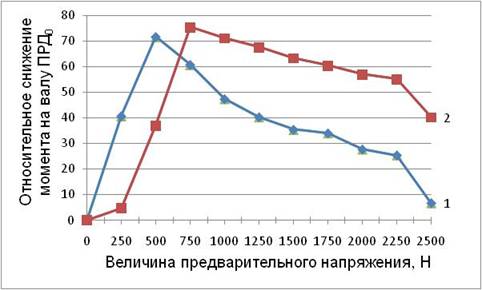
Рис.3. Относительное снижение момента на валу ПРДО в зависимости от величины предварительного напряжения
1 – для образца из алюминия;
2 – для образца из меди.
Поэтому при формировании нагрузочных устройств должна быть предусмотрена возможность саморегулирования или адаптации напряжения в контуре в соответствии с объектом обработки. Предложенная структурная модель позволяет осуществить последовательный синтез различных функциональных механизмов с напряженным замкнутым контуром и нагрузочных устройств, начиная со структурной и кинематической схем и заканчивая конструктивным решением. Кроме этого, позволяет перейти к созданию каталога структурных, кинематических и принципиальных схем нагружателей для мехатронных технологических систем.
Литература
-
1.Механизмы с силовым замыканием контура / В.С. Исаков, А.Н. Дровников, С.А. Кузнецов и др. Новочерк.политехн.ин-т. – Новочеркасск, 1991. – 141 с. – Деп. в ВИНИТИ 24.06.91. №2621-В91.
2.Исаков В.С. О формировании структур замкнутых напряженных гидромеханических контуров // Изв. вузов Сев.-Кавк.регион. Спец. Вып. Актуальные проблемы машиностроения. -2006. – С.81-88.
3.Энергосберегающие и энергонакопительные тормозные системы горных, строительных и подъемно-транспортных машин и использованием замкнутых кинематических контуров / А.Н. Дровников, В.С. Исаков, В.Д. Ерейский и др. // Горное оборудование и электромеханика. №10 – 2007. – С.29-35.
4.Исаков В.С. Об использовании напряженных замкнутых кинематических контуров в строительном оборудовании // Тр. Междунар. науч.-техн. конф. «Интерстроймех - 2001». – СПб: Изд-во СПбГТУ, 2001. – С.291-293.